IoT-Projekt (Eingangskontrolle)
für IoT-Projekt 2026
- Camera Erkennung
- Links für Raspberry Pi einrichtung
- Verläufiger Code für die Kameraerkennung mit mqtt übertragung
- Stabiler Code vor mqtt ergänzung
- Grundlagen + Infos
- LED Konfiguration
- MQTT-Broker Kram
- Manuelles ESP-32 Flashen mit Tasmota über Windows Terminal
- RFID Konfiguration
- Credentials
- Doku und Präsi
- Bilder
Camera Erkennung
Links für Raspberry Pi einrichtung
Benutztes Modell: Yolo 26n
Benötigte Applications:
Python Version 3.8 oder Älter
Verläufiger Code für die Kameraerkennung mit mqtt übertragung
Stabiler Code vor mqtt ergänzung
Grundlagen + Infos
Wir verwenden für dieses Projekt das bereits trainierte Personenerkennungsmodul von Ultralytics "YOLO"
Hierbei wird die neuste Version "yolo26n" benutzt.
Ultralytics hat hierfür bereits eine Python Library erstellt mit allen wichtigen Variablen und Funktionen bereits vordefiniert.
Das Personenerkennungsmodul ist als .pt (python torch) abgespeichert.
(
LED Konfiguration
=> Im Anhang liegen Dokumente für die Konfiguration.
WICHTIG: Voraussetzungen sind eine Tasmota geflashte ESP-32 und zusätzlich das ausgewählte Modul "WS2812" auf einen der Data-Pins der ESP-32! (In unserem Fall GPIO04).
ESP-32 Kabelverknüpfung:
Gehen wir davon aus, dass wir von oben auf die ESP-32 schauen und der USB-C Port nach unten schaut...
GND: 1. Reihe, außen (auf dem rechten Pinbrett)
Data: 6. Reihe, außen (auf dem rechten Pinbrett)
Voltage: 8. Reihe innen (auf dem linken Pinbrett)
Picture:
Licht AN/AUS
Topic: cmnd/esp32-led/POWER
Payload/Message: off ODER on
Licht TOGGLEN
Topic: cmnd/esp32-led/POWER
Payload/Message: toggle
Licht steuern
Topic: cmnd/esp32-led/Led
Payload/Message: <RGB/Hex> <RGB/Hex> etc...
=> Beispiel Payload/Message: 255,0,0 0,255,0 0,255,0
(Ersten drei Lichter werden gesteuert)
Um einzelne Lichter auszuschalten, setze Werte auf 0!
=> Beispiel Payload/Message: 0,0,0 ODER 000000
Licht Übergang/Fade
Topic: cmnd/esp32-led/Fade
Payload/Message: on ODER off
=> Lichter müssen anschließend erneut gesetzt werden, um Effekt zu sehen (Ändert nur Übergang zwischen Farben)
Licht Geschwindigkeit/Speed
Topic: cmnd/esp32-led/SPEED
Message/Payload: Anzahl in Sekunden
=> Beispielsweise Message/Payload: 3
(In 3 Sekunden werden die Lichter angezeigt)
=> Funktioniert nur mit Zusatzeffekten z.B Fade!
Alle Lichter steuern
Topic: cmnd/esp32-led/Color
Payload/Message: <RGB/Hex>
=> Besipiel Payload/Message: 0,255,0
MQTT Konfiguration des ESP-32:
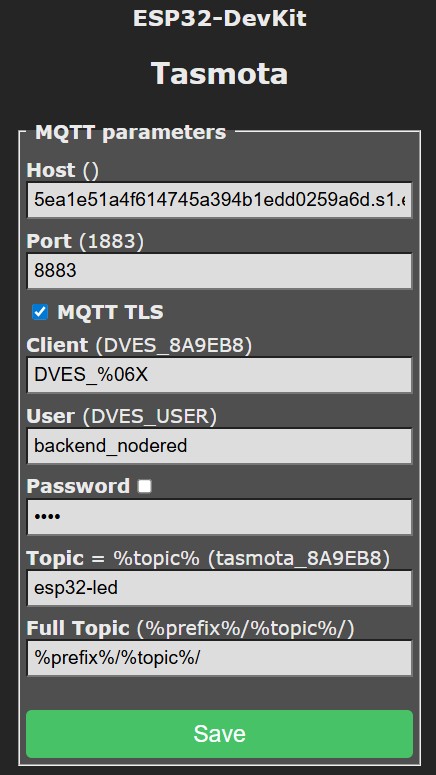
MQTT-Broker Kram
HiveMQ Broker URL:
5ea1e51a4f614745a394b1edd0259a6d.s1.eu.hivemq.cloud
Port: 8883 Websocket-Port: 8884
PERMISSON FÜR NUR SUB:
User: testuser
Passwort: O#%~54{Kf{-c-7t
PERMISSION FÜR SUB+PUB:
User: backend_nodered
Passwort: vzd)4S=5FZJ(U!5
Für später und Doku, da wo wir offiziell hinwollen:
Die Kommunikation erfolgt verschlüsselt über MQTT TLS (Port 8883). Der Zugriff auf den Broker ist durch individuelle Benutzerkonten und rollenbasierte Topic-Berechtigungen abgesichert.
Manuelles ESP-32 Flashen mit Tasmota über Windows Terminal
Vorbereitung
1. Downloade die passende Firmware für die ESP-32: (In unserem Fall die tasmota32.factory.bin)
Link: https://ota.tasmota.com/tasmota32/
2. Sollte der USB Port, an der die ESP32 hängt, nicht erkannt werden, muss zusätlich der USB-Bridge Driver heruntergeladen werden
Link: https://www.silabs.com/software-and-tools/usb-to-uart-bridge-vcp-drivers?tab=downloads
Downloade dann den CP210x Universal Windows Driver Treiber.
3. Installieren von Python
Link: https://www.python.org/ftp/python/3.14.4/python-3.14.4-amd64.exe
Durchführung
Um nun mit dem manuellen Flashen von Tasmota zu beginnen, muss zunächst das Python Paket "esptool" heruntergalden und installiert werden. Hierfür gib folgenden Befehl im Windows Terminal ein:
py -m pip install esptool
Nun müssen wir in das Verzeichnis wechseln, in der die Tasmota Firmware liegt (endend mit factory.bin)
cd %USERPROFILE%\Downloads
Bevor wir die ESP-32 flashen, sollten wir die aktuellen Daten der ESP-32 löschen, um Datenrendundanz zu vermeiden:
py -m esptool --chip esp32 --port COM3 erase_flash
COM3 = USB Port --> Kommt drauf an, an welchem Port die ESP-32 angeschlossen ist
=> Das kann man unter dem "Geräte Manager" in Windows herausfinden
Nun flashen wir die ESP-32 mit Tasmota:
py -m esptool --chip esp32 --port COM3 write_flash 0x0 tasmota32.factory.bin
Tasmota Webkonsole aufrufen:
Die Tasmota Webkonsole, kann über folgendem Link erreicht werden:
Link: https://tasmota.github.io/install/
Sollte die ESP-32 noch nicht mit dem WLAN verbunden sein, so klicke auf "Change Wi-Fi" und anschließend auf "Visit Device".
Sollte die ESP-32 sich noch in einem anderen Netz befinden, so kann man auch über die Webkonsole die ESP-32 mit einem anderen WLAN-Netz verbinden.
Dazu geht man unter "Logging & Console", nachdem man den Tasmota Webinstaller offen hat und gibt in die Konsole folgendes ein:
Backlog SSID1 <WLAN SSID>; Password1 <PASSWORT>
RFID Konfiguration
Verkabelung:
Pinanbindung des RFID Sensors zur ESP-32:
(Wir schauen auf die ESP-32 von oben mit dem USB-C Port nach unten gerichtet)
SDA --> IO05 (linkes Pinbrett 7. Pin innen)
SCK --> IO018 (linkes Pinbrett 4. Pin innen)
MOSI --> IO023 (linkes Pinbrett 6. Pin innen)
MISO --> IO019 (linkes Pinbrett 5. Pin innen)
GND --> GND (rechtes Pinbrett 1. Pin außen)
RST --> IO022 (rechtes Pinbrett 3. Pin innen)
3.3V --> 3.3V (linkes Pinbrett 8. Pin innen)
Tasmota GPIO-Konfiguration:
Anmeldung zur Webkonsole der RFID-ESP32:
Nutzername: admin
Passwort: wmzbj3JNAi1D0vwU1QGX
Nun konfigurieren wir die einzelnen Pins auf der ESP 32
=> Configuration > Module
GPIO018 --> SPI CLK
GPIO019 --> SPI MISO
GPIO023 --> SPI MOSI
GPIO05 --> RC522 CS
GPIO022 --> RC522 Rst
Broker-Topic:
Die ganzen RFID Scans werden unter dem Topic esp32-rfid veröffentlicht!
=> Der Output kommt dann unter dem Topic tele/esp32-rfid/SENSOR an!
Credentials
Tasmota Webkonsole: ESP32 für LED:
Nutzername: admin
Webpasswort: h1NVITgqxwccLfY0Wx2I
Tasmota Webkonsole: ESP32 für RFID:
Nutzername: admin
Webpasswort: wmzbj3JNAi1D0vwU1QGX
Node-Red:
Domäne: nodered.burgerbrater.de
Nutzername: admin
Passwort: w1W54GRFY1M014c
HiveMQ Creds:
Name: burgerbrater@proton.me
Passwort: )@3mvNF)8YU-US/7&=,'
HiveMQ backend User:
Nutzername: backend_nodered
Passwort: vzd)4S=5FZJ(U!5
PostgresSQL:
Datenbank: access_control
Tabelle: rfid_users
User: nodered
Passwort: Dg3fVpjvfhzb0ie
Host intern: postgres
Port intern: 5432
HiveMQ Publish ONLY
Username: broker_pub
Passwort: cx7R0fUu87Ljf61N0NLR
HiveMQ Subscribe ONLY
Username: broker_sub
Passwort: LrCqrtu9qpe8uJIyKeOB
Doku und Präsi
Zur Doku:
FERTIG !!!
Zur Präsi:
Mein Vorschlag zum Präsentieren:
| Themenblock | Referenten | Inhalt | Zeit |
| Vorstellung | Daniel | Begrüßung, Teamvorstellung, Start der Präsentation | ca. 1 min. |
| Übersicht Gesamtprojekt |
offen? alle/einer? |
Was ist unser Projekt (ganz kurz: Beschreibung / Ziel)? Grafik Gesamtarchitektur zeigen und erklären |
ca. 1-2 min. ca. 2 min. |
| LIVE DEMO |
alle ihr/einer? |
Unterbrechung der Präsi für Live-Demo... Beschreibung welche Komponenten und grob Ablauf |
ca. 3-5 min. |
| Grundlagen / Einführung | Daniel |
ggf. nochmal allgemeine Worte? Kurze Theorie zu RFID |
ca. 2-4 min. ? |
| ESPs, MQTT | Lars | individueller Part | max. 5 min. ? |
| Backend, Dienste | Daniel | individueller Part | max. 5 min. ? |
| Node-RED, Flows | Phil | individueller Part | max. 5 min. ? |
| YOLO-Cam | Nico | individueller Part | max. 5 min. ? |
| Fazit | Daniel |
Ergebnis, Verlauf (Probleme, Lösungen?), Ausblick Beendigung der Präsi :) |
ca. 2 min. |
Idee / Option: Jeder beginnt seine individuellen Folien kurz mit dem Schaubild und ordnet ein, wo man sich gerade befindet und worum es technisch geht ?!?
Offen: Übergänge moderierend gestalten (nicht: "Jetzt kommt Lars." :D, sondern Überleitungssatz zu Thema, ohne Namen zu nennen) ODER direkt mit Blickkontakt absprechend und nahtlos übernehmen ?!? :D ...
Offen bei Live-Demo: Klare Rollenverteilung vorab. Wer hält Chip? Wer redet/erklärt? Wer läuft durch Cam?
Mein Vorschlag zur Bearbeitung:
An Tabelle orientieren für Ablauf. Jeder bearbeitet seinen individuellen Part auf Basis der Vorlagen-Präsi-Datei vor und lädt sie hier hoch.
Ausstehend: Wer trägt unterschiedliche Dateien in finale Datei zusammen? Wer hat sie als .odt und .pdf? Wer hat Lapi / präsentiert, etc.?